这里记录的是我想从tvm的tensor expression出发,参考一下cutlass efficient gemm的思路,一步一步优化一下GEMM的一些思考和碎碎念,目的是为了理解cutlass优化gemm的思路。
我们使用CUTLASS Profiler来运行一个gemm的运算,并用nsight compute dump下来其运行过程中的一些情况,可以拿到他的一些信息,如grid的大小与block的大小等。比如对于16384的float32类型数据的gemm,cutlass的grid size是(512, 16, 1)-> 8192个block, block size是(256,1,1),一共是2,097,152个线程,因为最后产生C的大小是(16384,16384),所以平均每个thread需要产生128个C的元素,结合这些参数的信息,使用tvm的te进行schedule(其实可以试试tensor ir),最后成功打到了和cublas,cutlass相近的性能。
测试GPU: rtx 3090 24GB
CUDA Version: 11.1
TVM Version: 10.0
代码放在:https://github.com/LeiWang1999/tvm_gpu_gemm
naive gemm
最navie的情况,一个thread处理一个像素点的数据,这里我们选大小为1024的gemm为例子(因为这么做太慢了,大shape要跑很久)
for m in range 1024:
for n in range 1024
c[m][n] = 0.0
for k in range 1024:
c[m][n] += a[m][k]*a[k][n]对应到tvm的表达式:
# graph
nn = 1024
n = te.var("n")
n = tvm.runtime.convert(nn)
m, l = n, n
A = te.placeholder((l, n), dtype=_dtype, name="A")
B = te.placeholder((l, m), dtype=_dtype,name="B")
k = te.reduce_axis((0, l), name="k")
C = te.compute((m, n), lambda ii, jj: te.sum(A[k, jj] * B[k, ii], axis=k), name="C")tvm可以显式的bind thread,例如我们把第一个维度的loop bind到blockIdx.x,第二个维度的loop bind到threadIdx.x,就完成了每个thread计算一个C的像素。
block_x = te.thread_axis("blockIdx.x")
block_y = te.thread_axis("blockIdx.y")
thread_x = te.thread_axis("threadIdx.x")
thread_y = te.thread_axis("threadIdx.y")
i, j = s[C].op.axis
s[C].bind(i, block_x)
s[C].bind(j, thread_x)运行下来的速度是2.xms是cutlass的二十倍左右,生成的cuda kernel如下:
extern "C" __global__ void __launch_bounds__(1024) default_function_kernel0(float* __restrict__ C, float* __restrict__ A, float* __restrict__ B) {
C[((((int)blockIdx.x) * 1024) + ((int)threadIdx.x))] = 0.000000e+00f;
for (int k = 0; k < 1024; ++k) {
C[((((int)blockIdx.x) * 1024) + ((int)threadIdx.x))] = (C[((((int)blockIdx.x) * 1024) + ((int)threadIdx.x))] + (A[((k * 1024) + ((int)threadIdx.x))] * B[((k * 1024) + ((int)blockIdx.x))]));
}
}Blocked Gemm
分析上述生成的代码,每个thread需要从global memory读取两个数据,A和B,而显然,A和B中的数据都是可以被复用的,这就导致同一个数据被使用了几次,就从global memory中读取了几次,所需要地总的读取Global Memory的次数为 M*N*K*2 次,写M*N次。
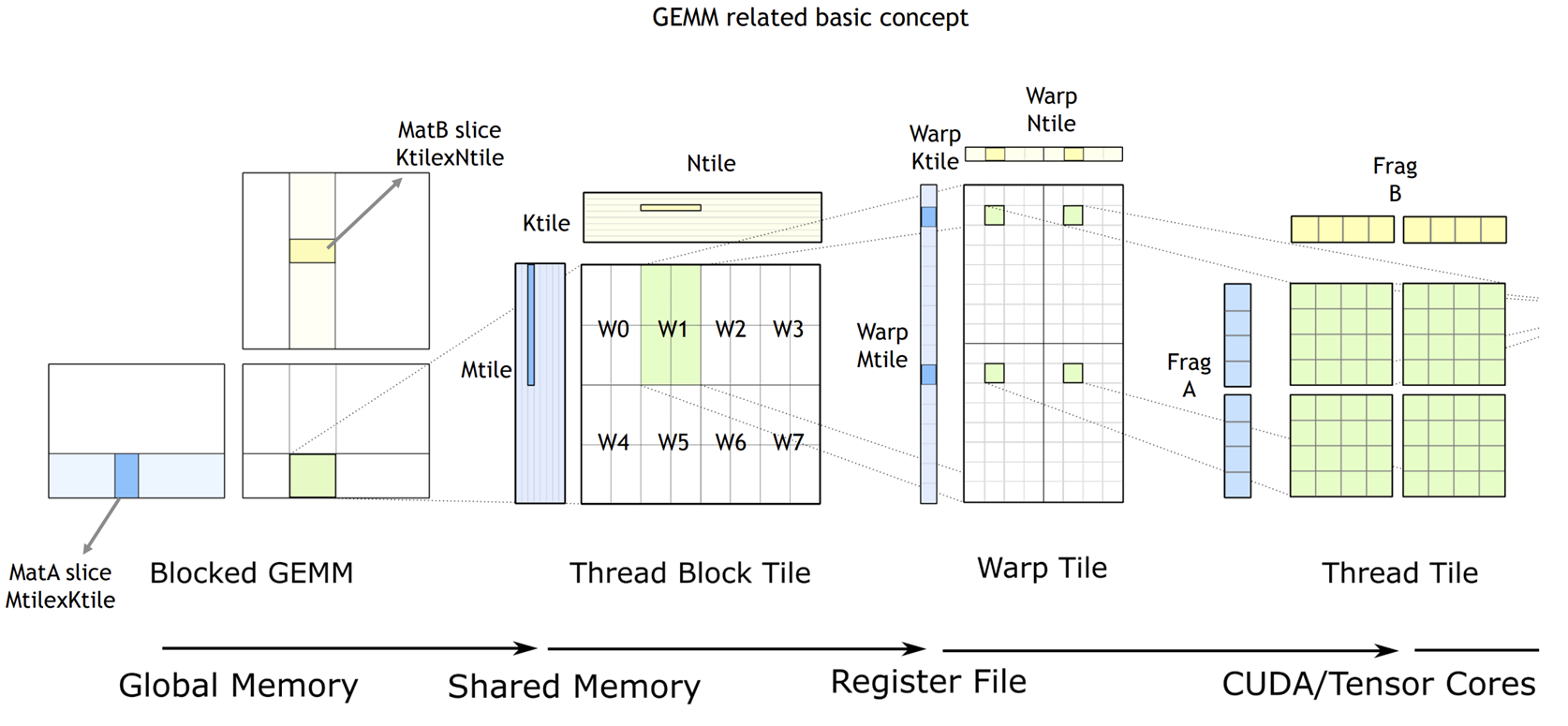
上图是CUTLASS实现高效GEMM的示意图,cutlass在第一层使用矩阵分块的方式来减少global memory的访问次数,在CPU上优化gemm同样也需要用到矩阵分块,不过cpu上的矩阵分块主要是为了fit L2 Cache的大小,这里的却略有不同,cutlass的图描述地不是很明了,绿色的方块代表的是一个block,负责产出一个C子矩阵的数据,可以通过A的浅蓝色的矩阵部分与B的浅黄色的矩阵部分乘累加得到,因为一个block内的thread共享share memory,所以可以提前把这两部分浅色的矩阵cache到share memory中。
现在暂时不考虑thread block tile这部分内容,则每个block内的thread各自负责一个计算像素,比如,我们一个block负责产生(32,32)个像素则在16384的gemm场景下:
M,K,N: 16384,16384,16384
grid_size: 16384, 16
block_size: 1024 (32,32)
对于grid来说,每一个block需要处理一个小的矩阵,具体到tvm的调度实现代码是:
bx, xi = s[C].split(C.op.axis[0], factor=(block_h))
write_code(str(tvm.lower(s, [A, B, C], simple_mode=True)), "progress/2.split_i.cu")
by, yi = s[C].split(C.op.axis[1], factor=(block_w))
write_code(str(tvm.lower(s, [A, B, C], simple_mode=True)), "progress/3.split_j.cu")
s[C].bind(bx, block_x)
s[C].bind(by, block_y)
s[C].reorder(bx, by, xi, yi)
write_code(str(tvm.lower(s, [A, B, C], simple_mode=True)), "progress/4.bind_block.cu")
s[C].bind(xi, thread_x)
s[C].bind(yi, thread_y)
write_code(str(tvm.lower(s, [A, B, C], simple_mode=True)), "progress/5.bind_thread.cu")split一般会用到factor和nparts这两个参数,其中factor指的是拆分因数,及block_h是拆分之后的内循环,nparts是拆成多少份,及指定的参数是拆分之后的外循环。
把i,j两层循环各自拆分成(_, 32),(_, 32), 再将这两层循环外提,就可以达到矩阵分块计算的效果,直接从global memory读取数据进行计算,一次计算的时间是4849.64ms,比cutlass要慢十倍。
接下来,给A、B、C加上cache,先以C举例,”local“表示结果暂存到寄存器中,则数据会先写到CC,再写回global:
CC = s.cache_write(C, "local")lower:
@main = primfn(A_1: handle, B_1: handle, C_1: handle) -> ()
attr = {"from_legacy_te_schedule": True, "global_symbol": "main", "tir.noalias": True}
buffers = {A: Buffer(A_2: Pointer(float32), float32, [268435456], []),
B: Buffer(B_2: Pointer(float32), float32, [268435456], []),
C: Buffer(C_2: Pointer(float32), float32, [268435456], [])}
buffer_map = {A_1: A, B_1: B, C_1: C}
preflattened_buffer_map = {A_1: A_3: Buffer(A_2, float32, [16384, 16384], []), B_1: B_3: Buffer(B_2, float32, [16384, 16384], []), C_1: C_3: Buffer(C_2, float32, [16384, 16384], [])} {
allocate(C.local: Pointer(local float32), float32, [1]), storage_scope = local {
C.local_1: Buffer(C.local, float32, [1], [], scope="local", align=4)[0] = 0f32
for (k: int32, 0, 16384) {
let cse_var_1: int32 = (k*16384)
C.local_1[0] = (C.local_1[0] + (A[((cse_var_1 + (blockIdx.y: int32*32)) + threadIdx.y: int32)]*B[((cse_var_1 + (blockIdx.x: int32*32)) + threadIdx.x: int32)]))
}
attr [IterVar(blockIdx.x, (nullptr), "ThreadIndex", "blockIdx.x")] "thread_extent" = 512;
attr [IterVar(blockIdx.y, (nullptr), "ThreadIndex", "blockIdx.y")] "thread_extent" = 512;
attr [IterVar(threadIdx.x, (nullptr), "ThreadIndex", "threadIdx.x")] "thread_extent" = 32;
attr [IterVar(threadIdx.y, (nullptr), "ThreadIndex", "threadIdx.y")] "thread_extent" = 32;
C[((((blockIdx.x*524288) + (threadIdx.x*16384)) + (blockIdx.y*32)) + threadIdx.y)] = C.local_1[0]
}
}发现计算都在c_local上进行了,但是thread和block都bind在C上,这样直接生成cuda程序会有错误,我们要把c_local挪到C的第一个维度(因为都已经绑定到thread了,所以这里C的计算没有循环,需要绑定到yi。
s[CC].compute_at(s[C], yi)这样可以生成cuda程序,验证性能,不过只把C缓存到local,对性能没有影响,估计是NVCC自己优化掉了,缓存A和B才是关键,但是缓存了A和B,就会尴尬地发现,share memory的大小不够用了,对于每个block,需要load两个16384,32大小的子矩阵,以单精度浮点数为例子,一共是256KB,一个SM也就128KB的share memory资源,所以不可以像这样一个thread计算一个像素。
| RTX 3090 | |
|---|---|
| register file per SM | 256 KB |
| Maximum number of resident threads per SM | 1536 |
| Max number of blocks per SM | 16 |
| shared memory size per SM | 128 KB |
Thread Block Tile
这一步需要进一步的决定,每个block里的thread是怎么计算的,对应cutlass efficent gemm中的第二张图,刚才的方法中,一个thread负责计算一个像素点的数据,在计算数据的时候每个thread又需要从global memory中读取两个 16384, 1 的数据,复用性极差。我们只能再进行分块,一次从global memory中load一部分数据进行计算。

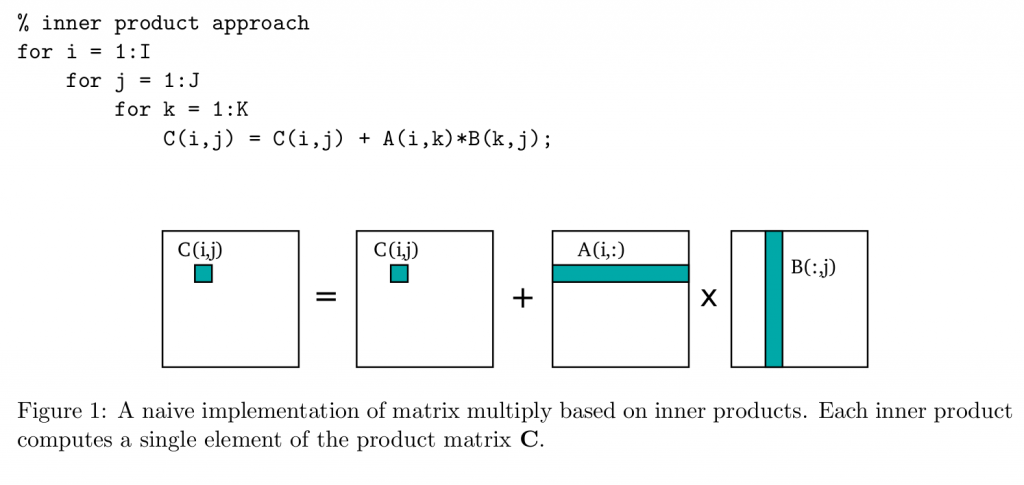
在这之后有两种计算方法,第一种是把浅色部分的矩阵按照inner product的方式,及下图所示:
还有一种是outer product,将最内层的K循环提出到最外层:
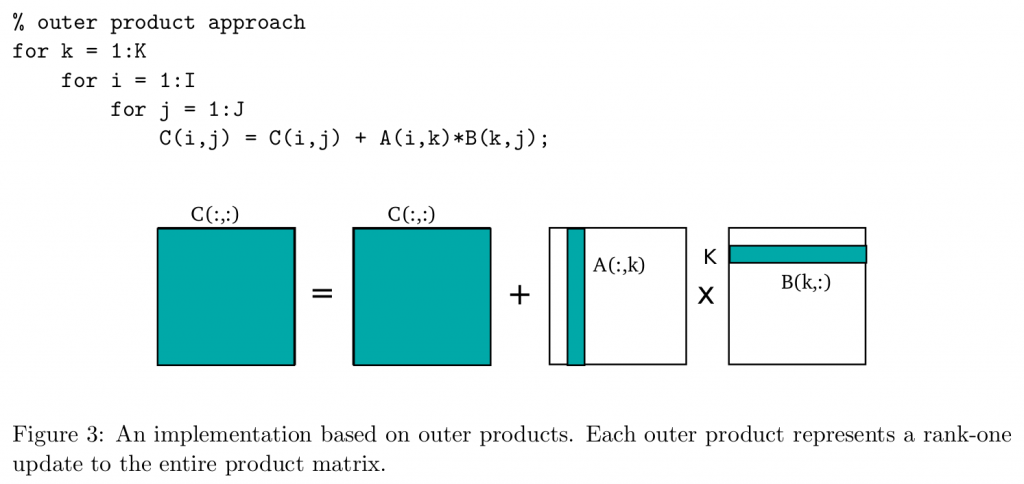
对应到cutlass的示意图,很明显,我看了很多加速gemm的资料,大家用的都是第二种外积的方式,不过也没有人说为什么要这么用,第一种内积的方式就是把A的浅色矩阵横过来切,我的理解是, 这样算下来有几个不方便的地方,一是外积的方式只需要决定Bk的大小,而外积的方式如果把K固定,那Bm和Bn就有两个参数需要调整,比较麻烦;二是在计算中,总有一些数据会被load多次,造成了额外的访存。虽然这种方式不能缓解inner product的局部性问题,但是在做矩阵分块的时候确实能更好地利用数据,不过外积的方式每次迭代存储的中间结果是一整个矩阵,内积是一小部分矩阵。
More sophisticated algorithms construct the product hierarchically from multiplications of smaller matrix blocks [7]. By computing outer products on small blocks of the input and output matrices, we can more effectively exploit spatial locality and data reuse. Figure 4 illustrates a blocking scheme with parameters I0, J0, and K0.
cite from : https://patterns.eecs.berkeley.edu/?page_id=158
通过这种方式,可以大大缓解之前从global memory获取数据带来的开销,在block计算每个小C矩阵的的时候,需要从global memory读取数据的次数变成了,设小C矩阵的长宽为Bm,Bn, 则总需要的访存量为:
$$
\frac{MN}{b_mb_n}(Kb_m + Kbn) =MNK(\frac{1}{b_m} + \frac{1}{b_n})
$$
也就是说,每次block只需要load BM*BK + BK*BN 大小的矩阵进入share memory,再循环K / BK次以完成整个矩阵乘法。
这样,就有几个超参数需要我们确定,Block size需要设置为多大?一个Block计算多少个数据?下面就这个问题讨论一下。
首先,关于block size的大小,一般会有两个具体的限制作约束,Maximum number of resident blocks per SM 和 Maximum number of resident threads per SM,也就是 SM 上最大同时执行的 block 数量和线程数量。要到达这个目的有多种方法,其中一个最简单的方法是让尽量多的线程同时在 SM 上执行,SM 上并发执行的线程数和SM 上最大支持的线程数的比值,被称为 Occupancy,更高的 Occupancy 代表潜在更高的性能。
显然,一个 kernel 的 block_size 应大于 SM 上最大线程数和最大 block 数量的比值,否则就无法达到 100% 的 Occupancy,对应不同的架构,这个比值不相同.>
对于 V100 、 A100、 GTX 1080 Ti 是 2048 / 32 = 64,对于 RTX 3090 是 1536 / 16 = 96,所以为了适配主流架构,如果静态设置 block_size 不应小于 96。虑到 block 调度的原子性,那么 block_size 应为 SM 最大线程数的约数,否则也无法达到 100% 的 Occupancy,主流架构的 GPU 的 SM 最大线程数的公约是 512,96 以上的约数还包括 128 和 256,也就是到目前为止,block_size 的可选值仅剩下 128 / 256 / 512 三个值。
cite from 如何设置CUDA Kernel中的grid_size和block_size?
不难发现,cutlass里的绝大多数kernel都选用的是128和256这两个值,当block中的thread数量变多,单个thread能吃到的资源就变小,反而会对编程产生限制。
其次,关于一个Block计算多少个数据,由于我们已经确定了block的大小,即一个block里可以有128/256个thread,乘上每个thread处理的像素个数,就可以得到每个block要算几个像素了,从刚才得到的公式中可以知道,一个block处理的像素点越多的时候,他的访存量就会越小,但显然这个值是有上限的,一个sm上的thread会均摊share memory。
有大概下面几个约束:
- 每个block至少需要往share memory里塞 (BM * BK + BK * BN)个数据,如果要乒乓缓存还需要double,一个SM上可以同时处理多个Block(貌似还是碎片化管理,动静态分配结合的方式,所以这也没有一个固定的最大值,可能要用心去感受)。
- 每个block有最大线程数的限制,如上表所示,3090的一个block的最大线程数是1536。
所以,BM、BN、BK、blockIdx的大小都是可以tune的,这些值确定下来,加上所要处理的所有像素就可以算出grid size。
回归到每个block里的thread是如何计算的,图二一个Block里有1024个线程,包含了八个warp tile,一个warp Tile包含了四个warp,一个warp有32个线程。
对与fp32的cutlass,测了一下在cudacore上最好的square 16384 kernel是cutlass_simt_sgemm_128x128_8x2_nt_align1,grid_size是(1024,16,1),block size是(256,1,1),平均一个线程处理六十四个数据,一个block处理16384个数据。
grid_size是(1024,16,1)和(128,128,1)是否有区别?
两个都是开了16384个 block,可能从thread的角度来看,没什么区别。
我们以同样的尺寸,用tvm模仿一下cutlass,这里我选择grid size是(128,128,1),block size是(16,16,1)。
首先,切一下KTile,这里选择的大小是16,因为我们一个block需要load BK*BN + BM * BK 大小的数据,在这个尺寸下是16128,如果选择BK=8,则是8\128, tvm把里面那个thread直接bind到thread会导致有一半的thread不能参与load global memory的任务里来:
BK = 16
## thread block tiling
ko, ki = s[CC].split(k, factor=BK)
xc, yc = s[CC].op.axis
s[CC].reorder(ko, ki, xc, yc)对应到生成的代码:
for (k.outer: int32, 0, 2048) {
for (k.inner: int32, 0, 8) {
for (ii.c: int32, 0, 8) {
for (jj.c: int32, 0, 8) {
let cse_var_4: int32 = ((ii.c*8) + jj.c)
let cse_var_3: int32 = ((k.outer*64) + (k.inner*8))
C.local_1[cse_var_4] = (C.local_1[cse_var_4] + (A.shared.local_1[(cse_var_3 + jj.c)]*B.shared.local_1[(cse_var_3 + ii.c)]))
}
}
}
}一行有16384个数据,由于BK是8,则每个thread需要迭代2048次才能玩车个完整的C的计算,很正确。
与之前的schedule不一样的是,一个thread需要同时处理多个元素,所以需要首先把loop拆分到threadIdx上:
bx, xi = s[C].split(C.op.axis[0], nparts=Grid_Size_X)
by, yi = s[C].split(C.op.axis[1], nparts=Grid_Size_Y)
s[C].bind(bx, block_x)
s[C].bind(by, block_y)
s[C].reorder(bx, by, xi, yi)接下来可以把A和B的cache也加上,这下不会out of shared memory了,理一下思路:
- 在 k.outer 这个维度的迭代中,每次从global memory load BM*BK*BN个数据load到share memory,显然这部分功能可以每个先线程load一部分加快速度。
- 在k.inner 这个维度的迭代中,把每个thread需要的部分数据load到local(register)上。
所以,我们先把两部分的load放到对应的位置:
s[AA].compute_at(s[CC], ko)
s[BB].compute_at(s[CC], ko)
s[AL].compute_at(s[CC], ki)
s[BL].compute_at(s[CC], ki)对应到生成的代码:
for (k.outer: int32, 0, 1024) {
for (ax0: int32, 0, 16) {
for (ax1: int32, 0, 128) {
A.shared_1: Buffer(A.shared, float32, [2048], [], scope="shared")[((ax0*128) + ax1)] = A[((((k.outer*262144) + (ax0*16384)) + (blockIdx.y*128)) + ax1)]
}
}
for (ax0_1: int32, 0, 16) {
for (ax1_1: int32, 0, 128) {
B.shared_1: Buffer(B.shared, float32, [2048], [], scope="shared")[((ax0_1*128) + ax1_1)] = B[((((k.outer*262144) + (ax0_1*16384)) + (blockIdx.x*128)) + ax1_1)]
}
}
for (k.inner: int32, 0, 16) {
for (ax1_2: int32, 0, 8) {
A.shared.local_1: Buffer(A.shared.local, float32, [8], [], scope="local", align=32)[ax1_2] = A.shared_1[(((k.inner*128) + (threadIdx.y*8)) + ax1_2)]
}
for (ax1_3: int32, 0, 8) {
B.shared.local_1: Buffer(B.shared.local, float32, [8], [], scope="local", align=32)[ax1_3] = B.shared_1[(((k.inner*128) + (threadIdx.x*8)) + ax1_3)]
}
for (ii.c: int32, 0, 8) {
for (jj.c: int32, 0, 8) {
let cse_var_1: int32 = ((ii.c*8) + jj.c)
C.local_1[cse_var_1] = (C.local_1[cse_var_1] + (A.shared.local_1[jj.c]*B.shared.local_1[ii.c]))
}
}
}
}直接生成cuda kernel运行,一次迭代消耗的时间是13717.8 ms,是cutlass的30倍。
然后,完成读取global memory的并行加速:
aa_tx, aa_xi = s[AA].split(s[AA].op.axis[0], nparts=Block_Size_X)
aa_ty, aa_yi = s[AA].split(s[AA].op.axis[1], nparts=Block_Size_Y)
s[AA].reorder(aa_tx, aa_ty, aa_xi, aa_yi)
s[AA].bind(aa_tx, thread_x)
s[AA].bind(aa_ty, thread_y)
bb_tx, bb_xi = s[BB].split(s[BB].op.axis[0], nparts=Block_Size_X)
bb_ty, bb_yi = s[BB].split(s[BB].op.axis[1], nparts=Block_Size_Y)
s[BB].reorder(bb_tx, bb_ty, bb_xi, bb_yi)
s[BB].bind(bb_tx, thread_x)
s[BB].bind(bb_ty, thread_y)生成的代码:
for (k.outer: int32, 0, 1024) {
for (ax1.inner: int32, 0, 8) {
A.shared_1: Buffer(A.shared, float32, [2048], [], scope="shared")[(((threadIdx.x*128) + (threadIdx.y*8)) + ax1.inner)] = A[(((((k.outer*262144) + (threadIdx.x*16384)) + (blockIdx.y*128)) + (threadIdx.y*8)) + ax1.inner)]
}
for (ax1.inner_1: int32, 0, 8) {
B.shared_1: Buffer(B.shared, float32, [2048], [], scope="shared")[(((threadIdx.x*128) + (threadIdx.y*8)) + ax1.inner_1)] = B[(((((k.outer*262144) + (threadIdx.x*16384)) + (blockIdx.x*128)) + (threadIdx.y*8)) + ax1.inner_1)]
}
for (k.inner: int32, 0, 16) {
for (ax1: int32, 0, 8) {
A.shared.local_1: Buffer(A.shared.local, float32, [8], [], scope="local", align=32)[ax1] = A.shared_1[(((k.inner*128) + (threadIdx.y*8)) + ax1)]
}
for (ax1_1: int32, 0, 8) {
B.shared.local_1: Buffer(B.shared.local, float32, [8], [], scope="local", align=32)[ax1_1] = B.shared_1[(((k.inner*128) + (threadIdx.x*8)) + ax1_1)]
}
for (ii.c: int32, 0, 8) {
for (jj.c: int32, 0, 8) {
let cse_var_1: int32 = ((ii.c*8) + jj.c)
C.local_1[cse_var_1] = (C.local_1[cse_var_1] + (A.shared.local_1[jj.c]*B.shared.local_1[ii.c]))
}
}
}
}一次迭代的时间缩小到854ms,已经缩小到cutlass的两倍了!
Wrap Tile & Bank Conflict
Shared memory 是以 4 bytes (一个word) 为单位分成 banks:
- 每个bank的带宽是32 bits per clock cycle
- 连续的32个word是放在连续的32个banks中
有关bank conflict的内容网上有很多说明的文章,下面是参考这一篇给出的说明,3090上,一共有32个bank,下面是以16个bank来举例的:
因此,假设以下的数据:
__shared__ int data[128];那么,data[0] 是 bank 0、data[1] 是 bank 1、data[2] 是 bank 2、…、data[15] 是 bank 15,而 data[16] 又回到 bank 0。
由于 warp 在执行时是以 half-warp 的方式执行(关于half-warp参照上一篇博客),因此分属于不同的 half warp 的 threads,不会造成 bank conflict。
因此,如果程序在存取 shared memory的时候,使用以下的方式:
int number = data[base + tid];那就不会有任何 bank conflict,可以达到最高的效率。但是,如果是以下的方式:
int number = data[base + 4 * tid];那么,thread 0 和 thread 4 就会存取到同一个 bank,thread 1 和 thread 5 也是同样,这样就会造成 bank conflict。 在这个例子中,一个 half warp 的 16 个 threads 会有四个 threads 存取同一个 bank,因此存取 share memory 的速度会变成原来的 1/4。
一个重要的例外是,当多个 thread 存取到同一个 shared memory 的地址时,shared memory 可以将这个地址的 32 bits 数据「广播」到所有读取的 threads,因此不会造成 bank conflict。
例如:
int number = data[3];这样不会造成 bank conflict,因为所有的 thread 都读取同一个地址的数据。
很多时候 shared memory 的 bank conflict 可以透过修改数据存放的方式来解决。
抱着这个思路回过头来观察我们现在的kernel对share memory的读写:
# write
for (ax1.inner: int32, 0, 8) {
A.shared_1: Buffer(A.shared, float32, [2048], [], scope="shared")[(((threadIdx.x*128) + (threadIdx.y*8)) + ax1.inner)] = A[(((((k.outer*262144) + (threadIdx.x*16384)) + (blockIdx.y*128)) + (threadIdx.y*8)) + ax1.inner)]
}
for (ax1.inner_1: int32, 0, 8) {
B.shared_1: Buffer(B.shared, float32, [2048], [], scope="shared")[(((threadIdx.x*128) + (threadIdx.y*8)) + ax1.inner_1)] = B[(((((k.outer*262144) + (threadIdx.x*16384)) + (blockIdx.x*128)) + (threadIdx.y*8)) + ax1.inner_1)]
}
# read
for (ax1: int32, 0, 8) {
A.shared.local_1: Buffer(A.shared.local, float32, [8], [], scope="local", align=32)[ax1] = A.shared_1[(((k.inner*128) + (threadIdx.y*8)) + ax1)]
}
for (ax1_1: int32, 0, 8) {
B.shared.local_1: Buffer(B.shared.local, float32, [8], [], scope="local", align=32)[ax1_1] = B.shared_1[(((k.inner*128) + (threadIdx.x*8)) + ax1_1)]
}因为float32的长度刚好是一个word,则索引%32就可以作为bank下标的标识。
写的过程中,假设第0个block的第0个thread开始,写入的地址为 0, 8, 16, 24, 32, 40…,明显第一个thread和第五个thread就写入了同一块bank。
thread虽然在逻辑上都是并行处理,但实际上是调度到warp上快速执行完一组thread,再快速执行下一组,而且bank是simd级别的,可以理解为一个share memory controller,所以我们只需要保证同一组warp上的thread不conflict就可以了。
分析之前的程序,写share memory部分造成conflict的原因主要是写schedule的时候,没有把最后一层的loop拆成threadx导致的,重新改一下schedule:
aa_yi, aa_ty = s[AA].split(s[AA].op.axis[0], factor=Block_Size_Y)
aa_xi, aa_tx = s[AA].split(s[AA].op.axis[1], factor=Block_Size_X)
s[AA].reorder(aa_ty, aa_tx, aa_xi, aa_yi)
s[AA].bind(aa_ty, thread_y)
s[AA].bind(aa_tx, thread_x)
bb_xi, bb_tx = s[BB].split(s[BB].op.axis[0], factor=Block_Size_Y)
bb_yi, bb_ty = s[BB].split(s[BB].op.axis[1], factor=Block_Size_X)
s[BB].reorder(bb_ty, bb_tx, bb_xi, bb_yi)
s[BB].bind(bb_ty, thread_y)
s[BB].bind(bb_tx, thread_x)生成的代码:
for (int ax1_outer = 0; ax1_outer < 8; ++ax1_outer) {
A_shared[(((((int)threadIdx.y) * 128) + (ax1_outer * 16)) + ((int)threadIdx.x))] = A[(((((k_outer * 262144) + (((int)threadIdx.y) * 16384)) + (((int)blockIdx.y) * 128)) + (ax1_outer * 16)) + ((int)threadIdx.x))];
}
for (int ax1_outer1 = 0; ax1_outer1 < 8; ++ax1_outer1) {
B_shared[(((((int)threadIdx.x) * 128) + (ax1_outer1 * 16)) + ((int)threadIdx.y))] = B[(((((k_outer * 262144) + (((int)threadIdx.x) * 16384)) + (((int)blockIdx.x) * 128)) + (ax1_outer1 * 16)) + ((int)threadIdx.y))];
}可以发现变成 s[tid] = g[xx]的形式了,没有bank conflict,而运行的时间也快了一些(快了100ms 左右的样子)。
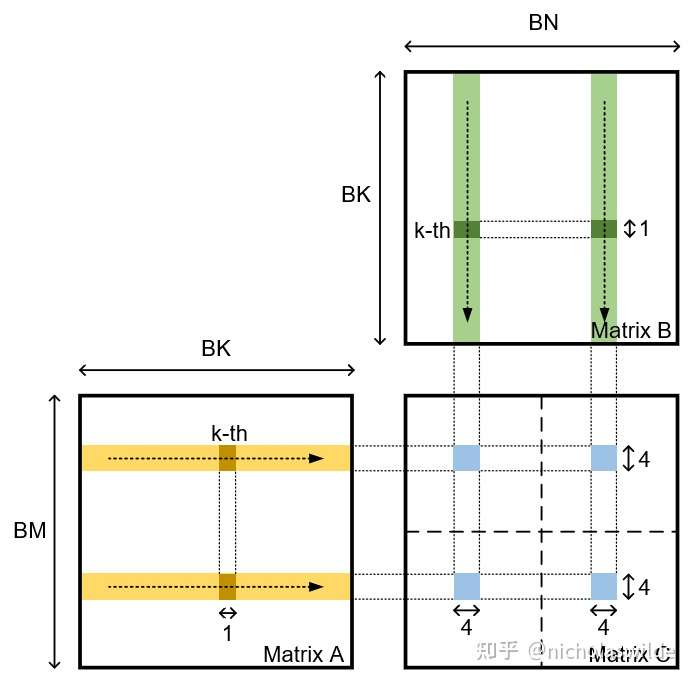
显然读的过程也存在bank conflict,这一点可以从第三张图中看到,左上角的32个虚线方格是一个warp的32个thread,同一行的thread会同时读取同一个A的值,同一列的thread会同时读取一个B的值,而从图中也能看出cutlass是怎么缓解这个问题:

访存的地址是:
for (int ax1 = 0; ax1 < 8; ++ax1) {
A_shared_local[ax1] = A_shared[(((k_inner * 128) + (((int)threadIdx.y) * 8)) + ax1)];
}
for (int ax11 = 0; ax11 < 8; ++ax11) {
B_shared_local[ax11] = B_shared[(((k_inner * 128) + (((int)threadIdx.x) * 8)) + ax11)];
}对于A来说,前十六个thread访问的memory地址是一样的,但是这时候应该有broadcast,对于B来说,访问的地址是0,8,16,32(32的时候会有conflict),
之前有人已经给出更丰富的图片说明了:https://zhuanlan.zhihu.com/p/518857175
在tvm里,实现这样的切分方式,并且明确说明了目的是为了缓解bank conflict的是virtual thread,如下:
tyz, yi = s[C].split(yi, nparts=2)
ty, yi = s[C].split(yi, nparts=Block_Size_Y)
txz, xi = s[C].split(xi, nparts=8)
tx, xi = s[C].split(xi, nparts=Block_Size_X)
s[C].bind(tyz, thread_yz)
s[C].bind(txz, thread_xz)
s[C].bind(ty, thread_y)
s[C].bind(tx, thread_x)565ms,生成的代码是:
B.shared.local_1: Buffer(B.shared.local, float32, [1], [], scope="local", align=4)[0] = B.shared_1[((k.inner*128) + threadIdx.x)]
B.shared.local_1[1] = B.shared_1[(((k.inner*128) + threadIdx.x) + 16)]
B.shared.local_1[2] = B.shared_1[(((k.inner*128) + threadIdx.x) + 32)]
B.shared.local_1[3] = B.shared_1[(((k.inner*128) + threadIdx.x) + 48)]
B.shared.local_1[4] = B.shared_1[(((k.inner*128) + threadIdx.x) + 64)]
B.shared.local_1[5] = B.shared_1[(((k.inner*128) + threadIdx.x) + 80)]
B.shared.local_1[6] = B.shared_1[(((k.inner*128) + threadIdx.x) + 96)]
B.shared.local_1[7] = B.shared_1[(((k.inner*128) + threadIdx.x) + 112)]这样,就没有bank conflict了,vthread虽然是虚拟的,但是如果直接用split+reorder的方式来替换:
tyz, yi = s[C].split(yi, nparts=2)
ty, yi = s[C].split(yi, nparts=Block_Size_Y)
txz, xi = s[C].split(xi, nparts=2)
tx, xi = s[C].split(xi, nparts=Block_Size_X)
s[C].bind(ty, thread_y)
s[C].bind(tx, thread_x)
s[C].reorder(tyz, txz, ty, tx, xi, yi)速度反而会慢不少(692.994ms),也有人在论坛里讨论过,而且看tvm的论文里提到的vthread,似乎还有类似于分析依赖,软件流水的神奇功能。
其他
vectorize
从global memory读取数据可以使用lgd.128指令,一次读4个float32的数据,从share memory 读取数据,可以用lgs.128,对应到tvm里则是使用vectorize进行向量化,这样,一条访存指令就可以直接load 4个float32的数据,为了做到这一点,首先需要从循环中把可以vectorize的shape手动拆出来,再进行向量化:
aa_yi, aa_ty = s[AA].split(s[AA].op.axis[0], factor=Block_Size_Y)
aa_xi, aa_tx = s[AA].split(s[AA].op.axis[1], factor=Block_Size_X * 4)
aa_tx, aa_vi = s[AA].split(aa_tx, nparts=Block_Size_X)
s[AA].reorder(aa_ty, aa_tx, aa_yi, aa_xi, aa_vi)
s[AA].bind(aa_ty, thread_y)
s[AA].bind(aa_tx, thread_x)
s[AA].vectorize(aa_vi)
bb_yi, bb_ty = s[BB].split(s[BB].op.axis[0], factor=Block_Size_Y)
bb_xi, bb_tx = s[BB].split(s[BB].op.axis[1], factor=Block_Size_X * 4)
bb_tx, bb_vi = s[BB].split(bb_tx, nparts=Block_Size_X)
s[BB].reorder(bb_ty, bb_tx, bb_yi, bb_xi, bb_vi)
s[BB].bind(bb_ty, thread_y)
s[BB].bind(bb_tx, thread_x)
s[BB].vectorize(bb_vi)生成的代码:
for (int ax1_outer = 0; ax1_outer < 2; ++ax1_outer) {
*(float4*)(A_shared + (((((int)threadIdx.y) * 128) + (ax1_outer * 64)) + (((int)threadIdx.x) * 4))) = *(float4*)(A + (((((k_outer * 262144) + (((int)threadIdx.y) * 16384)) + (((int)blockIdx.y) * 128)) + (ax1_outer * 64)) + (((int)threadIdx.x) * 4)));
}
for (int ax1_outer1 = 0; ax1_outer1 < 2; ++ax1_outer1) {
*(float4*)(B_shared + (((((int)threadIdx.y) * 128) + (ax1_outer1 * 64)) + (((int)threadIdx.x) * 4))) = *(float4*)(B + (((((k_outer * 262144) + (((int)threadIdx.y) * 16384)) + (((int)blockIdx.x) * 128)) + (ax1_outer1 * 64)) + (((int)threadIdx.x) * 4)));
}514ms,又快了50ms,接下来还可以对local register的访问做vectorize,也可以用lds.128,所以需要把vthread的大小改成2x2,这样分出来刚好是两个可以被vectorize的向量:
tyz, yi = s[C].split(yi, nparts=2)
ty, yi = s[C].split(yi, nparts=Block_Size_Y)
txz, xi = s[C].split(xi, nparts=2)
tx, xi = s[C].split(xi, nparts=Block_Size_X)
al_yi, al_xi = s[AL].op.axis
s[AL].vectorize(al_xi)
bl_yi, bl_xi = s[BL].op.axis
s[BL].vectorize(bl_xi)生成的代码:
__shared__ float4 A_shared[512];
__shared__ float4 B_shared[512];
for (int k_inner = 0; k_inner < 16; ++k_inner) {
*(float4*)(A_shared_local + 0) = A_shared[((k_inner * 32) + ((int)threadIdx.y))];
*(float4*)(A_shared_local + 4) = A_shared[(((k_inner * 32) + ((int)threadIdx.y)) + 16)];
*(float4*)(B_shared_local + 0) = B_shared[((k_inner * 32) + ((int)threadIdx.x))];
*(float4*)(B_shared_local + 4) = B_shared[(((k_inner * 32) + ((int)threadIdx.x)) + 16)];
for (int ii_c = 0; ii_c < 4; ++ii_c) {
for (int jj_c = 0; jj_c < 4; ++jj_c) {
C_local[((ii_c * 4) + jj_c)] = (C_local[((ii_c * 4) + jj_c)] + (A_shared_local[jj_c] * B_shared_local[ii_c]));
C_local[(((ii_c * 4) + jj_c) + 32)] = (C_local[(((ii_c * 4) + jj_c) + 32)] + (A_shared_local[(jj_c + 4)] * B_shared_local[ii_c]));
C_local[(((ii_c * 4) + jj_c) + 16)] = (C_local[(((ii_c * 4) + jj_c) + 16)] + (A_shared_local[jj_c] * B_shared_local[(ii_c + 4)]));
C_local[(((ii_c * 4) + jj_c) + 48)] = (C_local[(((ii_c * 4) + jj_c) + 48)] + (A_shared_local[(jj_c + 4)] * B_shared_local[(ii_c + 4)]));
}
}
}这样,一个warp里的thread访问的bank就是0,4,8,12,16…32. 到第九个线程的时候还是会出现bank conflict?这个应该是无法避免了,可能得交给nvcc来做软件流水,但是速度确实快了不少,达到了423ms, cublas和cutlass测出来的结果都是420ms,已经基本上达到这个水平了!
double buffer
当然如果load的时间过长,计算不能hide load latency的时候,可以试试double buffer来进行乒乓缓存,不过占用的share memory会翻倍,直接:
s[AA].double_buffer()
s[BB].double_buffer()但是在我的case下面,这个操作加上反而变得更慢(430ms)。。
最后
都已经能打到和cutlass相同的水平,我觉得也就差不多了,至少验证了tvm是真的行(至少在gemm上),当然以上有一些我自己的思考,不一定对,文章里还有一些问题没有解决,比如,(1024,16,1)和(128,128,1)这两个grid size是一样的么?群友觉得是不一样的,而我图编程方便,使用的后者,cutlass用的是前者,但从结果上来看,效果还可以,关于这些,欢迎大佬指正与交流,至于前面的区域,以后有时间了再来探索吧。
Comments